DipIETE – ET (OLD SCHEME)
Code: DE15 Subject:
CONTROL ENGINEERING
 Time: 3 Hours
Max. Marks: 100
Time: 3 Hours
Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory
and carries 20 marks. Answer to Q.1 must be written in the space provided for
it in the answer book supplied and nowhere else.
· Out of the
remaining EIGHT Questions, answer any FIVE Questions. Each question carries 16
marks.
· Any required data
not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or the best alternative in the following: (2![]() 10)
10)
a. The system with the characteristic equation ![]() is _________.
is _________.
(A)
stable (B) marginally stable
(C)
not necessarily stable (D) unstable
b. Signal flow graph is used to obtain
__________.
(A)
stability of the system
(B)
transfer function of the system
(C)
dynamic response of the system
(D)
poles of the system
c. The second order system is defined by ![]() is given a step input. The time taken for the response to
settle within ± 2% of input is
________.
is given a step input. The time taken for the response to
settle within ± 2% of input is
________.
(A)
1.2 ses (B) 1.6 sec
(C)
2 sec (D) 0.4 sec
d.
For the transfer function![]() , the breakaway point will lie between _________.
, the breakaway point will lie between _________.
(A) 0 and –1 (B) –1 and –2
(C)
–2 and –3 (D) beyond –3
e. If the open loop transfer function G (jw) of
a unity feedback system has a phase angle of –150o at the gain cross-over
frequency, the phase margin of the system is equal to __________.
(A) –150o (B) 210o
(C)
30o (D) –30o
f. The steady state error of a stable type ‘0’
unity feedback system for a unit step function is given as __________.
(A)
0 (B) ![]()
(C)
![]() (D)
(D) ![]()
g. From the Nichols chart, one can determine the
following quantities pertaining to closed loop system as:
(A)
Magnitude and phase (B) Bandwidth
(C)
Magnitude only (D) Both (A) & (B)
h. The transfer function of a simple RC network
functioning as compensator is![]() . The condition for RC network to act as phase lead
controller is ________.
. The condition for RC network to act as phase lead
controller is ________.
(A)
![]() (B)
(B) ![]()
(C)
![]() (D)
(D) ![]()
i. Gain cross-over frequency is defined as the
frequency at which _________.
(A)
![]() (B)
(B) ![]()
(C)
![]() (D)
(D) ![]()
j. If stability error for step input and speed
of response be the criteria for design, what type of controller would you
recommend?
(A)
P Controller. (B) PD Controller.
(C)
PI Controller. (D) PID controller.
Answer any FIVE Questions
out of EIGHT Questions.
Each question carries 16 marks.
Q. 2 a. Define
state space model and transfer function model. Give advantages and limitations
of state space model over transfer function model. (8)
b. A unit step
signal is applied on the second order system given by  . Find the dynamic response for
. Find the dynamic response for ![]() (8)
(8)
Q. 3 a. Reduce
the block diagram shown in the Fig.1 below and obtain the transfer function. (8)
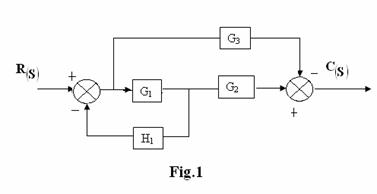
.
b. Explain
with neat sketches the construction and working of synchros. (8)
Q. 4 a. Discuss
the basic feedback characteristics of feedback control system. (8)
b. Define
stability, absolute stability, relative stability and conditional stability.
(8)
Q. 5 a. Find
the steady state error for unit step, unit velocity and unit acceleration
inputs for the system with ![]() . (8)
. (8)
b. Sketch
the root locus of a unity feedback system with![]() . (8)
. (8)
Q. 6 a. Draw
the bode plot for the following transfer function and determine the stability
margins: (8)
![]()
b. What
is M-circle? Explain in detail. (8)
Q.7 a. Using Nyquist Criterion, comment on the
stability of the system whose open loop transfer function is ![]() . (8)
. (8)
b. With
the help of block diagrams explain briefly:
(i) Derivative error and
(ii) Integral error
compensation. (8)
Q. 8 a. Write short note on:
(i) Use of digital computer as compensator.
(ii) Op-amp. (8)
b. State
the necessary condition for the Routh’s criterion for stability. Determine the
stability of the system whose characteristic equation is given by ![]() . (8)
. (8)
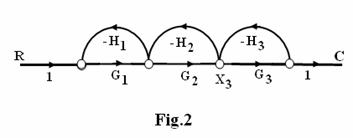
Q. 9 a. What
is Mason Gain Rule? Obtain ![]() for the signal flow graph shown in
for the signal flow graph shown in
Fig.2. (8)
b. Discuss
the tuning of PID controllers. (8)