Code: A-11 Subject: CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 11 Questions in all.
· Question 1 is compulsory and carries 16 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Answer any THREE Questions each from Part I and Part II. Each of these questions carries 14 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x8)
a. The steady-state error of a feedback control system with an acceleration input becomes finite in a
(A) type 0 system. (B) type 1 system.
(C) type 2 system. (D) type 3 system.
b. The
Laplace transform of ![]() is _______.
is _______.
(A)
![]() (B)
(B)
![]()
(C)
![]() (D)
(D)
![]()
c. Considering
the root locus diagram for a system with ![]() , the meeting point of the
asymptotes on the the real axis occurs at _________.
, the meeting point of the
asymptotes on the the real axis occurs at _________.
(A) –1.2 (B) –0.85
(C) –1.05 (D) –0.75
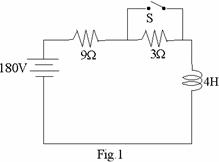
d. Figure 1 shows a circuit for which switch S is kept open for a long time and
then closed at t = 0. The dynamic equation governing the circuit will then be
___________.
(A)
 (B)
(B)
(C)  (D)
(D) 
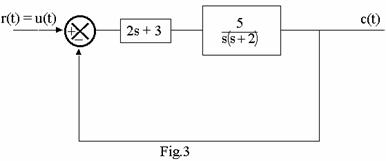
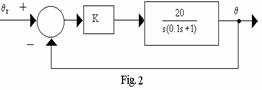
e. Considering the unity feedback system of Fig. 2, the settling time of the resulting second order system for 2% tolerance band will be ________.
(A)
3.33

(B) 4.5
(C) 2.25
(D) 2.84
f. If for a control system, the
Laplace transform of error e(t) is given as ![]() then the steady state value of the
error works out as ______.
then the steady state value of the
error works out as ______.
(A) 3.6 (B) 1.8
(C) 3.2 (D) 2.4
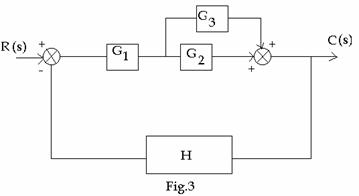
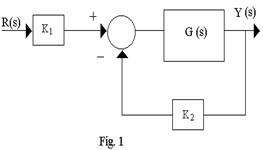
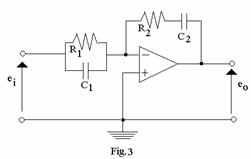
g. The transfer function of the block diagram of Fig.3 is _________.
(A) ![]() (B)
(B)
![]()
(C)
![]() (D)
(D)
![]()
|
h. The impulse response of a LTI system is a unit step function, then the corresponding transfer function is
(A)
![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
s.
. (D)
s.
PART I
Answer any THREE Questions. Each question carries 14 marks.
Q.2 Write the dynamic equation in respect of the
mechanical system given in Fig.4. Then using force-voltage analogy obtain the
equivalent electrical network.
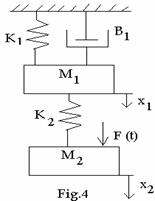
Legend
![]() spring constants
spring constants
![]() viscous friction damping
coefficient
viscous friction damping
coefficient
![]() inertial constants of masses
inertial constants of masses
![]() displacements
displacements
F (t) .. Force. (14)
Q.3 Determine the transfer function
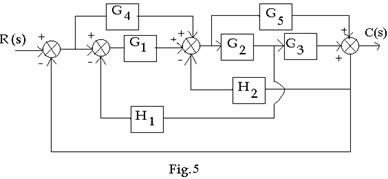
![]() for the block
diagram shown in Fig.5 by first drawing its signal flow graph and then using
the Mason’s gain formula. (14)
for the block
diagram shown in Fig.5 by first drawing its signal flow graph and then using
the Mason’s gain formula. (14)
Q.4 a. The open loop transfer functions of three systems are given as
(i) ![]() (ii)
(ii) ![]() (iii)
(iii) ![]()
Determine respectively the positional, velocity
and acceleration error constants for these systems. Also for the system given
in (ii) determine the steady state errors with step input ![]() , ramp input r(t) = t and
acceleration input
, ramp input r(t) = t and
acceleration input ![]() . (10)
. (10)
b. Describe a two phase a.c. servomotor and derive its transfer function. (4)
Q.5 a. A typical temperature control
system for the continuously stirred tank is given in Fig.6. The notations are
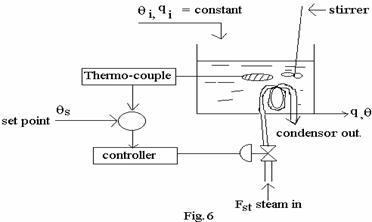
![]() for temperature,
q for liquid flow and
for temperature,
q for liquid flow and ![]() for the steam supplied to the steam
coil. Draw the block diagram of the system.
(10)
for the steam supplied to the steam
coil. Draw the block diagram of the system.
(10)
b. Considering a typical feedback control system, give the advantages of a P+I controller as compared to a purely proportional controller. (4)
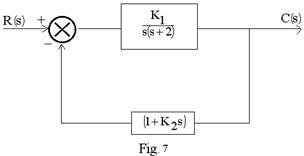
Q.6 a. For the system shown in the block diagram of Fig.7
determine the values of gain ![]() and velocity feedback constant
and velocity feedback constant ![]() so that the
maximum overshoot with a unit step input is 0.25 and the time to reach the
first peak is 0.8 sec. Thus obtain the rise time and settling time for 5% tolerance
band. (10)
so that the
maximum overshoot with a unit step input is 0.25 and the time to reach the
first peak is 0.8 sec. Thus obtain the rise time and settling time for 5% tolerance
band. (10)
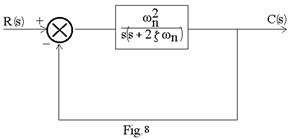
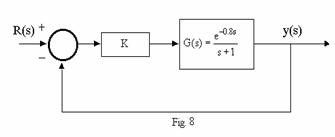
b. For the standard second order system shown in Fig.8, with r (t) = u (t) explain how the time domain specifications corresponding to resonant peak and bandwidth can be inferred. (4)
|
PART II
Answer any THREE Questions. Each question carries 14 marks.
Q.7 a. The characteristic equation of a closed loop
control system is given as ![]() . For this system determine the
number of roots to the right of the vertical axis located at s = - 2. (10)
. For this system determine the
number of roots to the right of the vertical axis located at s = - 2. (10)
b. Explain the procedure to be followed when in the
Routh’s array all the elements of a row corresponding to ![]() are zeros. (4)
are zeros. (4)
Q.8 Draw the complete Nyquist plot for a unity
feed back system having the open loop function ![]() . From this plot obtain all the
information regarding absolute as well as relative stability. (14)
. From this plot obtain all the
information regarding absolute as well as relative stability. (14)
Q.9 Sketch the root locus diagram for a unity
feedback system with its open loop function as ![]() . Thus find the value of K at a
point where the complex poles provide a damping factor of 0.5. (14)
. Thus find the value of K at a
point where the complex poles provide a damping factor of 0.5. (14)
Q.10 Justify the following statements :
(i) The impulse response of the standard second order system can be obtained from its unit step response.
(ii)
The Bode plot of the standard second order
function  has a high frequency slope of 40 db
/ decade.
has a high frequency slope of 40 db
/ decade.
(iii) The two phase a.c. servomotor has an inherent braking effect under zero-control-voltage condition.
(iv) An L.V.D.T. can be used for measuring the density of milk. (4x3.5)
Q.11 Write notes on any TWO of the following:
(i) Disturbance rejection.
(ii) Turning method based on the process reaction curve.
(iii) Phase lag compensation. (2 x 7)
JUNE / 2003
Code: A-11 Subject: CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 11 Questions in all.
· Question 1 is compulsory and carries 16 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Answer any THREE Questions each from Part I and Part II. Each of these questions carries 14 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x8)
a. For a type one system, the steady – state error due to step input is equal to
(A) infinite. (B) zero.
(C) 0.25. (D) 0.5.
b. The equation ![]() has
has
(A) one (B) two
(C) three (D) four
roots in the left half of s–plane.
c. If the Nyquist plot of the loop transfer function ![]() of a closed-loop system encloses the
of a closed-loop system encloses the ![]() point in the
point in the ![]() plane, the gain margin of the system is
plane, the gain margin of the system is
(A) zero. (B) greater than zero.
(C) less than zero. (D) infinity.
d. Consider the function ![]() , where
, where ![]() is the Laplace transform
is the Laplace transform
of f (t). ![]() is equal to
is equal to
(A) 5. (B) ![]() .
.
(C) zero. (D) infinity.
e. The transfer function of a phase-lead controller is given by
(A) ![]() (B)
(B) ![]()
(C) ![]() (D)
(D) ![]()
f. If the system matrix of a linear time invariant continuous system is given by ![]() , its characteristic equation is given by
, its characteristic equation is given by
(A) ![]() (B)
(B) ![]()
(C) ![]() (D)
(D) ![]()
g. Given a unity feedback control system with ![]() the value of K for a damping ratio of 0.5 is
the value of K for a damping ratio of 0.5 is
(A) 1. (B) 16.
(C) 32. (D) 64.
h. Given ![]() is equal to
is equal to
(A) ![]() . (B)
. (B) ![]() .
.
(C) ![]() . (D)
. (D) ![]() .
.
PART I
Answer any THREE Questions. Each question carries 14 marks.
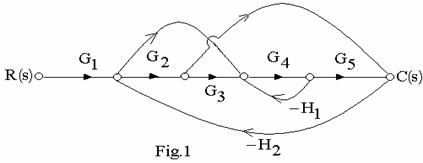
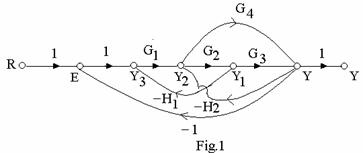
Q.2 Consider the system shown in Fig.1. Obtain the closed loop transfer function ![]() by the use of Mason’s gain formula. (14)
by the use of Mason’s gain formula. (14)
|
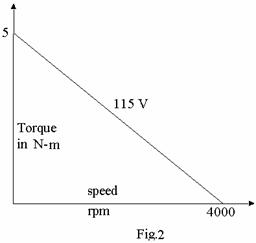
Q.3 Discuss the working of a two–phase servo–motor. Obtain the transfer function of the two-phase servo–motor whose torque–speed curve is shown in Fig.2. The maximum rated fixed-phase and control–phase voltages are 115 volts. The moment of inertia of the motor (including the effect of load) is
![]() Kgm-
Kgm-![]() . Motor friction (including the effect of load) is negligible. (7+7)
. Motor friction (including the effect of load) is negligible. (7+7)
Q.4 Obtain the unit – step response of a unity feedback control system whose open – loop transfer function is ![]() . Obtain also the rise time, peak time, maximum overshoot and settling time. (6+8)
. Obtain also the rise time, peak time, maximum overshoot and settling time. (6+8)
Q.5 a. Consider the closed-loop system given by  . Determine the values of
. Determine the values of ![]() and
and ![]() so that the system responds to a step input with approximately 5% overshoot and with a settling time of 2 seconds (use the 2% criterion). (7)
so that the system responds to a step input with approximately 5% overshoot and with a settling time of 2 seconds (use the 2% criterion). (7)
b. Obtain the unit-impulse response of a unity feedback control system whose open loop transfer function is ![]() . (7)
. (7)
Q.6 a. Determine the range of K for stability of a unity-feedback control system whose open-loop transfer function is ![]() . (7)
. (7)
b. Comment on the stability of a unity-feedback control system having the open-loop transfer function as ![]() . (7)
. (7)
PART II
Answer any THREE Questions. Each question carries 14 marks.
Q.7 Sketch the root loci for the system with ![]() . (14)
. (14)
Q.8 a. A unity feedback control system has the open-loop function as ![]() . Obtain the response of the system with a controller transfer function as
. Obtain the response of the system with a controller transfer function as ![]() and with a bit step input. (8)
and with a bit step input. (8)
|
b. Compare the response of a P+D controller with that of a purely proportional controller with unit step input, the system being a type–1 one. (6)
Q.9 Consider a unity feedback control system with the following open-loop transfer function ![]() . Determine the value of the gain K such that the phase margin is
. Determine the value of the gain K such that the phase margin is ![]() . What is the gain margin for this case? (8+6)
. What is the gain margin for this case? (8+6)
Q.10 Consider the system shown in Fig.4. Draw the Bode-diagram of the open-loop transfer function  with K = 1. Determine the phase margin and gain margin. Find the value of K to reduce the phase margin by
with K = 1. Determine the phase margin and gain margin. Find the value of K to reduce the phase margin by  . (14)
. (14)
|
Q.11 Write short notes on any TWO of the following :
(i) Controller tuning.
(ii) Constant M and N circles.
(iii) Phase-lead compensation. (7+7)
DEC./2003
Code: A-11 Subject: CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 11 Questions in all.
· Question 1 is compulsory and carries 16 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Answer any THREE Questions each from Part I and Part II. Each of these questions carries 14 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x8)
a. The state-variable description of a linear autonomous system is
![]()
Where ![]() is a two-dimensional state vector and A is a matrix given by
is a two-dimensional state vector and A is a matrix given by
![]()
The poles of the system are located at
(A) -2 and +2 (B) -2j and +2j
(C) -2 and -2 (D) +2 and +2
b. The LVDT is primarily used for the measurement of
(A) displacement (B) velocity
(C) acceleration (D) humidity
c. A system with gain margin close to unity or a phase margin close to zero is
(A) highly stable. (B) oscillatory.
(C) relatively stable. (D) unstable.
d. The overshoot in the response of the system having the transfer function
 for a unit-step input is
for a unit-step input is
(A) 60%. (B) 40%.
(C) 20%. (D) 10%.
e. The damping ratio of a system having the characteristic equation
![]() is
is
(A) 0.353 (B) 0.330.
(C) 0.300 (D) 0.250.
f. The input to a controller is
(A) sensed signal. (B) desired variable value.
(C) error signal. (D) servo-signal.
g. If the transfer function of a first-order system is
![]() , then the
, then the
time constant of the system is
(A) 10 seconds. (B) ![]() second.
second.
(C) 2 seconds. (D) ![]() second.
second.
h. The unit-impluse response of a system starting from rest is given by
![]()
The transfer function of the system is
(A) ![]() (B)
(B) ![]()
(C) ![]() (D)
(D) ![]()
PART I
Answer any THREE Questions. Each question carries 14 marks.
Q.2 a. Explain the gain formula for a signal flow graph to find the closed-loop transfer function of a feedback control system. (6)
b. For the system whose signal flow graph is shown by Fig.1, find ![]() (8)
(8)
|
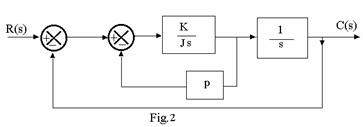
Q.3 Determine the values of K and p of the closed-loop system shown in Fig.2 so that the maximum overshoot in Unit Step response is 25% and the peak time is 2 seconds. Assume that J=1 Kg-![]() . (14)
. (14)
|
Q.4 Obtain the Unit-step response of a unity-feedback whose open-loop transfer function is
Find also the steady-state value of the Unit-Step response. (10+4)
Q.5 a. Consider the characteristic equation
![]()
Using the Routh’s stability criterion, determine the range of K for stability. (8)
b. Find the number of roots of characteristic equation which lie in the right half of s-plane for K =100. (6)
Q.6 Discuss three methods of tuning controllers. (14)
PART II
Answer any THREE Questions. Each question carries 14 marks.
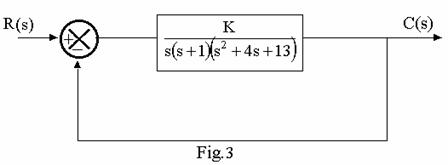
Q.7 Sketch the root loci for the system shown in Fig.3 (14)
|
Q.8 The forward path transfer function of a Unity-feedback control system is given as
![]()
Draw the Bode plot of G(s) and find the value of K so that the gain margin of the system is 20 dB. (14)
Q.9 The loop transfer function of a single feedback-loop control system is given as
![]()
Apply the Nyquist criterion and determine the range of values of K for the system to be stable. (14)
Q.10 a. The transfer functions for a single-loop non-unity-feedback control system are given as
Find the steady-state errors due to a unit-step input, a unit-ramp input and a parabolic input. (9)
b. Find also the impulse response of the system described in part (a). (5)
Q.11 Write short notes on any TWO of the following :
(i) Constant M and N circles.
(ii) A. C. Servomotor.
(iii) Stepper Motor. (2 x 7 = 14)
JUNE/2004
Code: A-11 Subject: CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 11 Questions in all.
· Question 1 is compulsory and carries 16 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Answer any THREE Questions each from Part I and Part II. Each of these questions carries 14 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x8)
a. Closed-loop transfer function of a unity-feedback system is given by ![]() . Steady-state error to unit-ramp input is
. Steady-state error to unit-ramp input is
(A) ![]() (B)
(B) ![]()
(C) 1 (D) ![]()
b. Electrical time-constant of an armature-controlled dc servomotor is
(A) equal to mechanical time-constant.
(B) smaller than mechanical time-constant.
(C) larger than mechanical time-constant.
(D) not related to mechanical time-constant.
c.
In the system of Fig.1, sensitivity of
![]() with respect to parameter
with respect to parameter ![]() is
is
(A) ![]()
(B) ![]()
(C) 1
(D) None of the above.
d. The open-loop transfer function of a unity feedback system is
The system is unstable for
(A) K>5 (B) K<5
(C) K>0 (D) all the above.
e. Peak overshoot of step-input response of an underdamped second-order system is explicitly indicative of
(A) settling time. (B) rise time.
(C) natural frequency. (D) damping ratio.
f. A unity feedback system with open-loop transfer function ![]() is critically damped. The value of the parameter p is
is critically damped. The value of the parameter p is
(A) 4. (B) 3.
(C) 2. (D) 1.
g. Consider the position control system of Fig.2. The value of K such that the steady-state error is ![]() for input
for input ![]() rad/sec, is
rad/sec, is
|
(A) 104.5
(B) 114.5
(C) 124.5
(D) None of the above.
h. Polar plot of ![]()
(A) crosses the negative real axis.
(B) crosses the negative imaginary axis.
(C) crosses the positive imaginary axis.
(D) None of the above.
PART I
Answer any THREE Questions. Each question carries 14 marks.
Q.2 a. Define the transfer function of a linear time-invariant system in terms of its differential equation model. What is the characteristic equation of the system? (5)
b.
Derive the transfer function of the op amp circuit shown in Fig.3. Also, prove that the circuit processes the input signal by ‘proportional + derivative + integral’ action. (9)
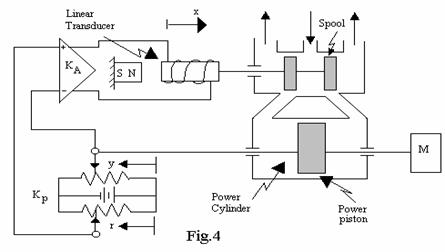
Q.3 The electro hydraulic position control system shown in Fig.4 positions a mass M with negligible friction. Assume that the rate of oil flow in the power cylinder is ![]() where x is the displacement of the spool and
where x is the displacement of the spool and ![]() is the differential pressure across the power piston.. Draw a block diagram of the system and obtain therefrom the transfer function
is the differential pressure across the power piston.. Draw a block diagram of the system and obtain therefrom the transfer function ![]() .
.
The system constants are given below.
Mass M = 1000 kg
Constants of the hydraulic actuator:
![]() = 200 cm2/sec per cm of spool displacement
= 200 cm2/sec per cm of spool displacement
![]() = 0.5 cm2/sec per gm-
= 0.5 cm2/sec per gm- ![]() t/ cm2
t/ cm2
Potentiometer sensitivity KP = 1 volt/cm
Power amplifier gain KA = 500 mA/volt
Linear transducer constant K = 0.1 cm/mA
Piston area A = 100 cm2 (14)
|
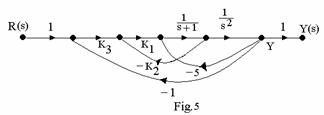
Q.4 A servo system is represented by the signal flow graph shown in Fig.5. The nominal values of the parameters are ![]() .
.
Determine the overall transfer function![]() and its sensitivity to changes in
and its sensitivity to changes in ![]() under steady dc conditions, i.e., s = 0. (14)
under steady dc conditions, i.e., s = 0. (14)
|
Q.5 a. Define the terms:
(i) bounded-input, bounded-output (BIBO) stability,
(ii) asymptotic stability. (2+2)
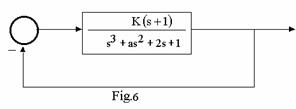
b. Determine the values of K>0 and a>0 so that the system shown in
Fig.6 oscillates at a frequency of 2 rad/sec. (10)
|
Q.6 Consider the control system shown in Fig 7 in which a proportional compensator is employed. A specification on the control system is that the steady-state error must be less than two per cent for constant inputs.
(i) Find Kc that satisfies this specification. (5)
(ii) If the steady-state criterion cannot be met with a proportional compensator, use a dynamic compensator
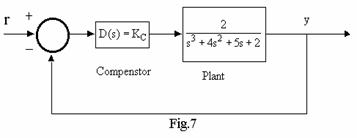
![]() . Find the range of
. Find the range of ![]() that satisfies the requirement on steady-state error. (9)
that satisfies the requirement on steady-state error. (9)
PART II
Answer any THREE Questions. Each question carries 14 marks.
Q.7 Discuss the compensation characteristics of cascade PI and PD compensators using root locus plots. Show that
(i) PD compensation is suitable for systems having unsatisfactory
transient response, and it provides a limited improvement in
steady-state performance.
(ii) PI compensation is suitable for systems with satisfactory
transient response but unsatisfactory steady-state response. (7+7)
Q.8 a. State and explain the Nyquist stability criterion. (5)
b. Use the Nyquist criterion to determine the range of values of K>0 for the stability of the system in Fig. 8. (9)
|
Q.9 a. When is a control system said to be robust? (4)
b. A unity-feedback system has open-loop transfer function ![]() .
.
(i) Using Bode plots of ![]() , determine the phase margin of the system.
, determine the phase margin of the system.
(ii) How should the gain be adjusted so that phase margin is 50°?
(iii) Determine the bandwidth of gain-compensated system.
The –3dB contour of the Nichols chart may be constructed using the following table.
Phase, degrees |
0 |
-30 |
-60 |
-90 |
-120 |
-150 |
-180 |
-210 |
Magnitude, dB |
7.66 |
6.8 |
4.18 |
0 |
-4.18 |
-6.8 |
-7.66 |
-6.8 |
(10)
Q.10 The open-loop transfer function of a control system is
(i) Draw the Bode plot and determine the gain crossover frequency, and phase and gain margins.
(ii) A lead compensator with transfer function
is now inserted in the forward path. Determine the new gain crossover frequency, phase margin and gain margin. (6+8)
Q.11 Discretize the PID controller
 to obtain PID algorithm in
to obtain PID algorithm in
(i) position form
(ii) velocity form.
What are the advantages of velocity PID algorithm over the position
algorithm? (14)