Code: D-15 Subject: CONTROL ENGINEERING
Time: 3 Hours June 2006 Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x10)
a. When analogy between liquid level and electrical systems is drawn, voltage is considered as analogous to
(A) Liquid Flow (B) Liquid Flow rate
(C) Head (D) None of the above
b. The system with characteristics equation s4+3s3+6s2+9s+12=0
(A) stable (B) unstable
(C) marginally suitable (D) none of the above
c. The torque-speed characteristic of an a.c. servomotor with control voltage (ec) equal to zero shows that
(A) the torque is positive and remains constant as speed is varied.
(B) the torque is negative and its magnitude increases with speed.
(C) the speed remains constant with variation in torque.
(D) the speed increases linearly with torque.
d. Phase Margin of a system is used to specify
(A) Relative stability (B) Absolute stability
(C) Time response (D) frequency response
e. What fraction of derivative of error will be needed in order to produce a damping ration of 0.5?
(A) 0.008 (B) 0.08
(C) 0.04 (D) 0.02
f. The Bode plot of the transfer function G(s) = s is
(A) Constant magnitude and constant phase shift angle.
(B) -20 dB/decade and constant phase shift angle.
(C)
20
dB/decade and phase shift of ![]() .
.
(D) Zero magnitude end phase shift.
g. For a type-one system the steady-state error due to step input is equal to
(A) infinite.
(B) zero.
(C) finite constant.
(D) one.
h. Which of the following is not in frequency domain?
(A) Nyquist criterion (B) Bode plot
(C) Root locus plot (D) All of the above
i. The number of root loci branches, which do not terminate at zero is given by
(A) the number of zeros
(B) the number of poles
(C) the number of zeros + the number of poles
(D) the number of zeros – the number of poles
j. In case the magnitude of the polar plot at phase cross over is A then the gain margin is
(A) Zero (B) A
(C) -A (D) 1/A
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
Q.2 a. What is a signal flow graph? Explain important properties of signal flow graph. (6)
b. Find
the transfer function ![]() (s)/Ef (s) of a
field-controlled dc motor in Fig.1 (10)
(s)/Ef (s) of a
field-controlled dc motor in Fig.1 (10)
|
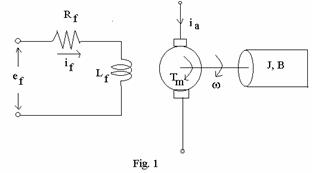
Assume that in the diagram
|
ef |
= 110 volts |
|
ia |
= 15 ampere |
|
|
= 1200 rpm |
|
Lf |
= 20 henery |
|
Rf |
= 120ohms |
|
J |
= 1 lb-ft-sec2 |
|
F |
= 0.5 lb-ft/rad/sec |
|
Tm |
= torque developed by motor |
|
|
= speed |
Q.3 a. What is a block diagram? What are the elements of the block diagram? (6)
b. Construct the block diagram representation for a system characterized by differential equation.
 (10)
(10)
Q.4 a. What are the different types of automatic controllers? (4)
b. State the equation of a controller with proportional-plus-integral-plus derivative control action. Draw the block diagram of PID controller and show by diagram the controller output with unit-ramp input. (12)
Q.5 a. Define the following terms for specifying the transient response characteristics of a control system to a unit step input. Also draw the unit- step response curve showing these terms.
(i) delay time, td
(ii) rise time, tr
(iii) peak time, tp
(iv) maximum overshoot, Mp
(v) setting time, ts (8)
b. Closed loop transfer
function of standard second order system with unity feed back is![]() where
where ![]() = 0.6 and
= 0.6 and ![]() = 5 rad/sec
= 5 rad/sec
Calculate, the rise time tr, peak time tp, maximum overshoot Mp and settling time ts, when the system is subjected to a unit step input. (8)
Q.6 a. Give a brief note on constant-M circles. (4)
b. Discuss the stability of the system with characteristic equation
![]() (12)
(12)
Q.7 a. What are the different type of steady state error constants? Explain in brief. (6)
b. The open loop transfer function of a feed back system is
![]()
Sketch the root locus plot with K as a variable parameter. (10)
Q.8 Sketch the Bode plot for the following transfer function?
![]() (16)
(16)
Q.9 a. Write short notes on any one of the following:
(i) Different types of compensation.
(ii) Use of digital computer as compensator device. (6)
b. A closed loop system having the following open loop transfer function.
![]()
Determine the stability of the system by Nyquist plot. (10)