Code: A-11 Subject: CONTROL ENGINEERING
Time: 3 Hours June 2006 Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x10)
a. For type-2 system, the steady-state error due to ramp input is equal to
(A) zero. (B) finite constant.
(C) infinite. (D) one.
b. The Nyquist plot of a system passes through (-1, jo) point, the phase margin of the system is
(A) greater than zero. (B) zero.
(C) less than zero. (D) undefined.
c. The transfer
function of a phase-lead compensator is given by ![]() where a > 1 and T > 0. The
maximum phase-shift provided by such a compensator is
where a > 1 and T > 0. The
maximum phase-shift provided by such a compensator is
(A)
![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
. (D)
![]() .
.
d. Given the matrix  , its eigenvalues are:
, its eigenvalues are:
(A) all negative and different (B) two are negative
(C) one is negative (D) all are negative with two of them being equal
e. The impulse
response of a second-order under-damped system starting from rest is given by ![]() . The natural
frequency and the damping factor of the system are respectively
. The natural
frequency and the damping factor of the system are respectively
(A) 10 and 0.6 (B) 10 and 0.8
(C) 8 and 0.6 (D) 8 and 0.8
f. In the system in Fig.1,
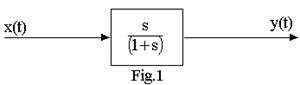
![]() . In the
steady-state, the response y (t) will be
. In the
steady-state, the response y (t) will be
(A)
![]() (B)
(B)
![]()
(C) ![]() (D)
(D)
![]()
g. The steady-state
error co-efficient for a system are given by ![]() and
and ![]() finite constant. The system is a
finite constant. The system is a
(A) type 0 system. (B) type 1 system.
(C) type 2 system. (D) type 3 system.
h. The input to a controller in a control system is
(A) sensed signal. (B) error signal.
(C) desired variable value. (D) servo signal.
i. The rotor terminals of a synchro-transmitter is energised with
(A)
![]() a.c. voltage. (B)
a.c. voltage. (B)
![]() a.c.
voltage.
a.c.
voltage.
(C) ![]() a.c. voltage. (D)
D.C. voltage.
a.c. voltage. (D)
D.C. voltage.
j. The transfer
function of a first-order electrical system is ![]() . The time-constant of the system is
. The time-constant of the system is
(A) 10 seconds. (B)
![]() second.
second.
(C) 2 seconds. (D)
![]() second.
second.
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
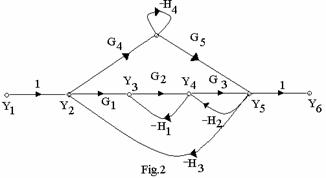
Q.2 Find
the gains ![]() and
and
![]() for the
signal-flow graph shown in Fig.2. (16)
for the
signal-flow graph shown in Fig.2. (16)
|
Q.3 a. Show that the root loci for a control system with
 are arcs of the
circle centered at the origin
are arcs of the
circle centered at the origin
with radius equal to ![]() . (14)
. (14)
b. Examine the stability of the system with K = 1. (2)
Q.4 a. The loop
transfer function for a control system is given as ![]() . Determine the
steady-state error for a unit-step input, a unit-ramp input and a parabolic
input. (9)
. Determine the
steady-state error for a unit-step input, a unit-ramp input and a parabolic
input. (9)
b. Examine the stability of the system with K = 1? (7)
Q.5 The
specifications of a second-order control system with the closed-loop transfer
function  are
that the maximum overshoot must not exceed 10 percent and the rise time must be
less than 0.1 second. Find the corresponding limiting values of
are
that the maximum overshoot must not exceed 10 percent and the rise time must be
less than 0.1 second. Find the corresponding limiting values of ![]() and bandwidth
analytically. (16)
and bandwidth
analytically. (16)
Q.6 The loop transfer function G(s) H(s) of a single-loop feedback
control system is given as ![]() . Sketch the Nyquist plot of
. Sketch the Nyquist plot of ![]() for
for ![]() to
to ![]() . Determine the
stability of the closed-loop system. (16)
. Determine the
stability of the closed-loop system. (16)
Q.7 a. The characteristic equation of a control system is given as
![]() . Determine the range of K for
stability. (8)
. Determine the range of K for
stability. (8)
b. Prove that for BIBO stability, the roots of the characteristic equation must lie in the left-half of s-plane. (8)
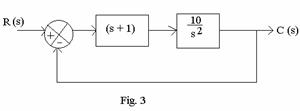
Q.8 Find the unit-step response for the control system shown in Fig.3. (16)
Q.9 Write short notes on any TWO of the following:
(i) P-I-D Controller.
(ii) D.C. servo-motor.
(iii) Phase-lead compensation. (16)