Code: AE-11 Subject:
CONTROL ENGINEERING 
Time: 3 Hours Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x10)
a. For the first order system described by the transfer function
![]() , the unit ramp
response for r(t)=t is
, the unit ramp
response for r(t)=t is
(A) 4(t – 4 + 2e–t/2) (B) 2(t – 2 + 4e–t/4)
(C) 3(2 – t + 4e–t/4) (D) 4(t – 2 + 2e–t/2)
b.
The feedback control system shown in Fig.1 is stable if
the scalar gain factor K satisfies the condition:
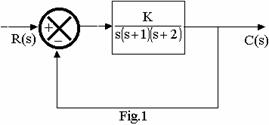
(A) K > 0.
(B) K < 6.
(C)
![]() .
.
(D)
![]()
c. The open-loop
transfer function of a feedback control system is given by ![]() . The gain margin of the
system is
. The gain margin of the
system is
(A) Infinity (B) 20 dB.
(C) 10 dB. (D) 2 dB.
c.
In the system shown in Fig.2,
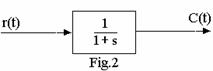
![]() . In steady-state C(t) is
given by
. In steady-state C(t) is
given by
(A)
![]()
(B)
![]()
(C) ![]()
(D) ![]()
e. In feedback control system, the purpose of providing integral feedback is to
(A) improve the stability margin. (B) improve the transient response.
(C) reduce the steady-state error. (D) stabilize the unstable system.
f. A stable, type-0 unity-feedback control system has a position error constant equal to 1. The steady-state error for a unit step input will be
(A) 0 (B) 1
(C) 0.5 (D) 2
g. The
characteristic equation of a linear unity feedback control system is given by ![]() . The system is
. The system is
(A) unstable. (B) stable.
(C) marginally stable. (D) conditionally stable.
h. In the signal flow graph shown in Fig.3,
the number of pairs of non-touching loops is
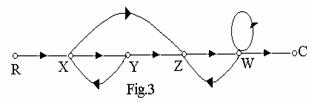
(A) 1.
(B) 2.
(C) 3.
(D) 4.
i. A system transfer
function of the form ![]() can be represented in the Bode plot
at frequencies
can be represented in the Bode plot
at frequencies ![]() by
a slope of
by
a slope of
(A)
8 ![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
. (D) ![]() .
.
j. The impulse
response of a linear time invariant system is given by ![]() . The system can be
characterized by
. The system can be
characterized by
(A) first-order system. (B) second-order system.
(C) third-order system. (D) fourth-order system.
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
Q.2 a. Determine the values of K and p of the closed-overshoot in unit-step response is 25% and the peak time is 2 seconds. (12)
|
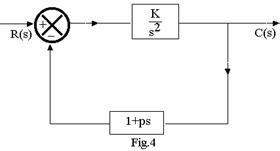
b. Find out the stability of the system when K=1 and p=1. (4)
Q.3 a. Find out the transfer function of an armature controlled D.C. servo-motor. (12)
b. What do you mean by the terms
(i) type of control systems and
(ii) steady-state error. (4)
Q.4 Consider
a unity-feedback control system whose open-loop transfer function is ![]() .
.
(i) Obtain the response to a unit-step input. (8)
(ii) What is the rise time for this system? (4)
(iii) What is the maximum overshoot? (4)
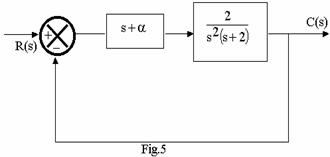
Q.5 Consider the system
shown in Fig.5. Sketch the root loci as ![]() varies from 0 to
varies from 0 to ![]() . Determine the value of
. Determine the value of ![]() such that the
damping ratio of the dominant closed-loop poles is 0.5. (16)
such that the
damping ratio of the dominant closed-loop poles is 0.5. (16)
Q.6 a. Explain Nyquist stability criterion. (4)
b. Using Nyquist stability criterion find the critical value of K for the stability of closed-loop system having the following open-loop transfer function:
![]() . (12)
. (12)
Q.7 a. The
open-loop transfer function of a feedback control system is given by ![]() . Sketch a
Nyquist locus for this system. Using the Nyquist stability criterion, determine
the range of K for stability. (12)
. Sketch a
Nyquist locus for this system. Using the Nyquist stability criterion, determine
the range of K for stability. (12)
b. What is the effect of feedback on stability of control system? (4)
Q.8 Write short notes on any TWO of the following:
(i) Synchros.
(ii) P-I-D controller.
(iii) Two-phase servo-motor. (8+8)
Q.9 a. The characteristic equation of a feedback control system is given as
![]() .
.
Determine the value of K so that the system is marginally stable and the frequency of sustained oscillation, if applicable. (12)
b. Discuss the effects and limitations of phase-lag compensation. (4)