AMIETE – ET (OLD SCHEME)
 Code:
AE11 Subject:
CONTROL ENGINEERING
Code:
AE11 Subject:
CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose
the correct or the best alternative in the following: (2![]() 10)
10)
a. In a closed loop feedback control system, the positive feedback means
(A) the output is feedback so that it subtracts from reference input in order to give actuating signal.
(B) the output is feedback so that it adds to reference input in order to give actuating signal.
(C) both (A) & (B).
(D) None of these.
b.
Linearized model of ![]() around 2 is
around 2 is
(A)
![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
. (D) ![]() .
.
c. The concept of transfer function applies to
(A) linear time varying systems.
(B) linear and non-linear systems.
(C) linear time invariant systems.
(D) only to MIMO systems.
d. The position of a
moving object of constant mass M and force f applied are related to M ![]() , the transfer
function of the system is
, the transfer
function of the system is
(A)
![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
Ms.
. (D)
Ms.
e. Consider function
![]() where
F(s) = Laplace transform of f(t). The final value of f(t) is equal to
where
F(s) = Laplace transform of f(t). The final value of f(t) is equal to
(A) one. (B) infinity.
(C) zero. (D) none of the above.
f. If the root loci of a closed loop system separates at a point between two open loop poles, the point is known as
(A) break away point. (B) shift point.
(C) crossover point. (D) transition point.
g. The initial slope of the Bode plot for a transfer function having a simple zero at origin is
(A) -20 dB/decade. (B) 10 dB /decade.
(C) 20 dB/decade. (D) -10 dB/decade.
h. In state space representation of a control system x = Ax + Bu, the state transition matrix is
(A) ![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
. (D)
![]() .
.
i. In reference to frequency domain analysis of a linear control system, the value of M-circles is
(A) ![]() . (B)
. (B)
![]() .
.
(C) ![]() . (D)
. (D)
![]() .
.
j. In the
characteristic equation of second order system, ![]() , the
, the ![]() represents
represents
(A) stability factor. (B) biasing factor.
(C) damping ratio. (D) None of these.
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
Q.2 a. For
a mechanical system of Fig.1, draw the mechanical equivalent network, write the
system equations and find
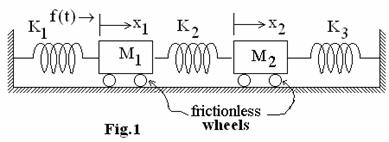
![]() of the system. (6)
of the system. (6)
b. The
transfer function of a control system is ![]() . Find the response y(t) to the
input
. Find the response y(t) to the
input ![]() where
K, a and
where
K, a and ![]() are
constants and
are
constants and ![]() is
sinusoidal frequency. (10)
is
sinusoidal frequency. (10)
Q.3 a. A linear feedback control
system has the block diagram as shown in Fig.2. Using block diagram reduction
rules, obtain closed loop transfer function
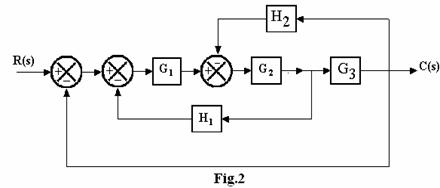
![]() . (8)
. (8)
b. In the armature
controlled DC motor, a voltage![]() , is applied to the armature.
Derive the transfer function
, is applied to the armature.
Derive the transfer function ![]() of the motor and draw its block
diagram. (8)
of the motor and draw its block
diagram. (8)
Q.4 a. Show with the help of an examples that the introduction of derivative mode of control in a feedback system with proportional control makes the system response less oscillatory? (8)
b. Explain the significance of the following aspects in designing control systems
(i) Stability (ii) Disturbance rejection
(iii) Sensitivity and Robustness. (8)
Q.5 a. Explain the Routh
stability criterion for a feedback control system. The characteristics
equation of a feedback control system is ![]() , using Routh criterion
, using Routh criterion
(i) determine the range of k for which the system be stable.
(ii) can the system be marginally stable? If so, find the required value of k and the frequency of sustained oscillation. (8)
b. When a second order
control system is subjected to unit step input, the value of ![]() and
and
![]() .
Determine the rise time, break time, settling time and peak overshoot.
(8)
.
Determine the rise time, break time, settling time and peak overshoot.
(8)
Q.6 a. Sketch the root-loci for the system with ![]() .Find
the value of k
.Find
the value of k
(i) for maginal stability
(ii) at break away point
(iii) for ![]() (12)
(12)
b. Explain lag-lead compensation for a linear control system. (4)
Q.7 a. Sketch the Bode plots showing the magnitude and phase as function of log frequency for transfer function
![]() . Determine
. Determine
(i) Gain crossover frequency.
(ii) Phase crossover frequency.
(iii) Phase margin
(iv) Gain margin (12)
b. Discuss the steady state error for various inputs and system. (4)
Q.8 a. Sketch
Nyquist plot for open loop transfer function ![]() . Obtain gain margin and phase
margin. (12)
. Obtain gain margin and phase
margin. (12)
b. What is Nichols chart? How can resonance peak and band width be identified from it? (4)
Q.9 a. Describe the important advantages offered by using digital computer as compensator device in a control system. What are main problems associated with implementation of digital control? (10)
b. Explain Robust control system. (6)