Code: DE15 Subject: CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x10)
a. With feedback ___________ increases.
(A) system stability (B) system gain
(C) system accuracy (D) All of the above
b. A unity feedback control system has
forward path transfer function as ![]() , the type and order of system is,
respectively
, the type and order of system is,
respectively
(A) 0, 2 (B) 0, 1
(C) 1, 2 (D) None of the above
c. The transfer function of a control system is given as ![]() .
For this system to be critically damped, the value of gain K should
be
.
For this system to be critically damped, the value of gain K should
be
(A) 1 (B) 2
(C) 3 (D) 4
d. The transfer function of a system G(s) is ![]() .
When operated as a unity feedback system, the steady state error to a unit step
input will be
.
When operated as a unity feedback system, the steady state error to a unit step
input will be
(A) zero (B) 1/11
(C) 10 (D) infinity
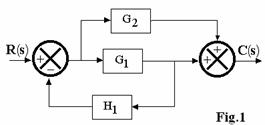
e. Block diagram is shown in Fig.1. Find the transfer
function C(s)/R(s)
|
(A) ![]() (B)
(B) ![]()
(C) ![]() (D)
(D) ![]()
f. Nyquist criterion is used to find which of the following
(A) Absolute stability (B) Relative stability
(C) Both (A) and (B) (D) None of the above
g. Characteristic equation of a control system is given as
![]()
The system is
(A) STABLE (B) UNSTABLE
(C) MARGINALLY STABLE (D) DATA IS INSUFFICIENT
h. A root locus originates from __________ and terminates at __________ respectively.
(A) open loop poles, open loop zeroes
(B) closed loop poles, closed loop zeroes
(C) open loop zeroes, open loop poles
(D) closed loop zeroes, closed loop poles
i. The gain for constructing the Bode plot in relation to transfer function
![]() is
is
(A) 20 (B) 10
(C) 40 (D) 5
j. The lag-compensation has a
(A) Zero nearer to the origin (B) Pole nearer to the origin
(C) Pole at the origin (D) Zero at the origin
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
Q.2 a. Define open loop and closed loop control system. Discuss the merits and demerits of open loop and closed loop control system. (6)
b. Obtain the transfer function of mechanical network shown in Fig.2.
|
|
|
|
|
|
|
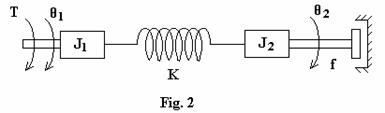
where J1 & J2 are moment of inertia of wheel 1 & 2 respectively,
T = applied torque, K = spring constant. ![]() must be taken as angular displacement
at the output. f = coefficient of viscous
friction.
(10)
must be taken as angular displacement
at the output. f = coefficient of viscous
friction.
(10)
Q.3 a. An open loop
transfer function for a unity feedback system is given as ![]() .
.
The above system has damping ratio as 0.2. It is desired to have a damping ratio of 0.8, determine, to what factor the amplifier gain K must be changed? (8)
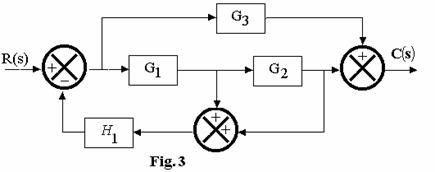
b. Determine the transfer function for the block diagram shown in Fig.3, using block diagram reduction technique. (8)
|
|
|
|
|
|
|
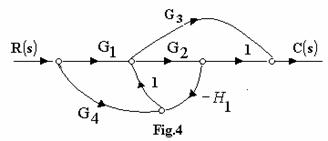
Q.4 a. Obtain the
transfer function for the given signal flow graph shown in
Fig.4.
|
(8)
b. Derive the values of step, ramp and parabolic error constants and steady state error for type 1 system. (8)
Q.5 a. Explain with the help of block diagram important featuring. PID controllers used for controlling industrial process. (8)
b. Draw the root locus for the feedback system with open loop
transfer function as ![]() . Given that K varies from 0 to
. Given that K varies from 0 to
![]() .
(8)
.
(8)
Q.6 a. Consider the characteristic equation of a closed
loop control system. Using the Routh stability criteria determine the
range of ‘K’ so that system is stable ![]() (8)
(8)
b. Draw the bode plot for the open loop transfer function ![]() .
Find Gain Margin, phase margin and comment on the stability of
system.
(8)
.
Find Gain Margin, phase margin and comment on the stability of
system.
(8)
Q.7
Draw the Nyquist plot for the given open loop transfer function ![]() comment upon the
stability of
system.
(16)
comment upon the
stability of
system.
(16)
Q.8 a. Draw the polar
plot for open loop transfer function ![]() .
(8)
.
(8)
b. Give brief notes on
(i) Constant M circles & N circles.
(ii) Use of digital computers as compensation devices. (8)
|
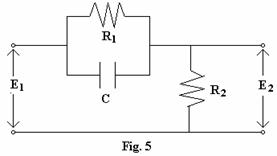
Q.9 a. Derive the
transfer function ![]() for the phase
lead network shown in Fig.5. Find the values of a and T in terms of R1,
R2 and
C.
(8)
for the phase
lead network shown in Fig.5. Find the values of a and T in terms of R1,
R2 and
C.
(8)
b. Discuss the working of tachogenerator. (8)