 Code: DE15 Subject:
CONTROL ENGINEERING
Code: DE15 Subject:
CONTROL ENGINEERING
Time: 3 Hours Max. Marks: 100
NOTE: There are 9 Questions in all.
· Question 1 is compulsory and carries 20 marks. Answer to Q. 1. must be written in the space provided for it in the answer book supplied and nowhere else.
· Out of the remaining EIGHT Questions answer any FIVE Questions. Each question carries 16 marks.
· Any required data not explicitly given, may be suitably assumed and stated.
Q.1 Choose the correct or best alternative in the following: (2x10)
a. The transfer function of the
system is given by ![]() then the impulse response function
is
then the impulse response function
is
(A)
![]() (B)
(B)
![]()
(C)
![]() (D)
(D)
![]()
b. The open-loop transfer function of a feedback control system is
given as ![]() .
The gain margin of the system in decibels is
.
The gain margin of the system in decibels is
(A) 0. (B) 10.
(C) 20. (D) infinite.
c. The steady-state
error coefficients for a system are given by ![]() and
and ![]() finite constant. The system is a
finite constant. The system is a
(A) Type 0 system. (B) Type one system.
(C) Type two system. (D) Type three system.
d. A closed loop
system with unity feedback has open-loop transfer function given as ![]() . The system may
have the characteristic equation having
. The system may
have the characteristic equation having
(A) all roots in the left half of s-plane.
(B) all roots in the right half of s-plane.
(C) some roots in the right half and some roots in the left half of s-plane.
(D) all roots on the imaginary axis.
e. Transfer function representation of a system assumes that
(A) system inputs are unit-step type.
(B) all initial conditions are zero.
(C) system is stable.
(D) system output is exponential.
f. A system
transfer function ![]() can be represented in the Bode-plot
for the values of
can be represented in the Bode-plot
for the values of ![]() by a straight line of slope
by a straight line of slope
(A) –6 dB/octave. (B) 12 dB/decade.
(C) –30 dB/decade. (D) –20 dB/decade.
g. A transfer function is called minimum phase if
(A) it has all its poles and zeros in the left half of s-plane.
(B) it has all its poles in the left half of s-plane.
(C) it has all its poles in the left half of s-plane and zeros in the right half of s-plane.
(D) it has all its poles and zeros in the right half of s-plane.
h. The transfer
function of a first order system is ![]() . The time constant of the system is
. The time constant of the system is
(A)
10
seconds. (B) ![]() second.
second.
(C) 2 seconds. (D)
![]() second.
second.
i. The unit-step
response of a system starting from rest is given by ![]() for
for ![]() . The transfer function of
the system is
. The transfer function of
the system is
(A)
![]() (B)
(B)
![]()
(C) ![]() (D)
(D)
![]()
j. The open-loop
transfer function of a unity-feedback control system is given by ![]() . The phase
margin of the system is
. The phase
margin of the system is
(A) ![]() (B)
(B)
![]()
(C) ![]() (D)
(D)
![]()
Answer any FIVE Questions out of EIGHT Questions.
Each question carries 16 marks.
Q.2 a. Obtain the signal flow graph for the block diagram shown in Fig.1. Find the transfer function C(s)/R(s) using Mason’s Gain Formula. (12)
|
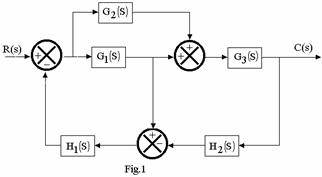
b. Discuss the effect of feedback on stability. (4)
Q.3 The
open-loop transfer function of a unity feedback control system is given as ![]() .
.
a. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system as a function of K. (10)
b. How do you determine the value of K that will cause sustained constant-amplitude oscillations in the system and the corresponding frequency of oscillation? (6)
Q.4 The block diagram of a feedback control system is given in Fig.2.
|
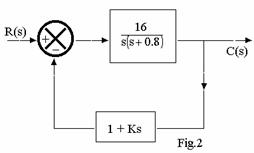
Determine
the values of K such that the damping ratio ![]() is 0.5. Then obtain the rise time
is 0.5. Then obtain the rise time ![]() , peak time
, peak time ![]() , the maximum
overshoot
, the maximum
overshoot ![]() and
settling time
and
settling time ![]() from
the unit-step response. (16)
from
the unit-step response. (16)
Q.5 a. Determine the
step, ramp and parabolic error constants of the unity-feedback control system
having open-loop transfer function given as ![]() . Also determine the steady-state
errors for a unit-step input, a unit ramp and a unit parabolic input
. Also determine the steady-state
errors for a unit-step input, a unit ramp and a unit parabolic input ![]() . (10)
. (10)
b. What is the effect of feedback on sensitivity in control system? (6)
Q.6 a. Consider the unity-feedback control system whose
open-loop transfer function is ![]() . Determine the value of ‘a’ so that
the phase-margin of the system is
. Determine the value of ‘a’ so that
the phase-margin of the system is ![]() . (8)
. (8)
b. What do you mean by the terms
(i) gain margin (ii) phase-margin
for a control system. How do you determine them from the Bode plot? (8)
Q.7 a. State and explain Nyquist stability criterion. Distinguish between Encircled and Enclosed. (8)
b. Draw the Nyquist plot for a unity feedback control system, whose open loop transfer function is given as:
![]()
comment upon the stability of system. (8)
Q.8 Write short notes on any TWO of the following:
(i) Phase lead compensation.
(ii) LVDT.
(iii) D.C. servo-motor. (16)
Q.9 a.
Find the angles of the asymptotes and the intersection of the asymptotes of the
root loci of the following characteristic equation of a control system when K
varies from 0 to ![]() .
.
![]() (8)
(8)
b. Explain the terms conditionally stable and marginally stable control systems. (8)